EOSS (which incorporates the Embedded Linux Conference) is an umbrella event for open source embedded projects and developer communities to come together under one roof for important collaboration, discussions and education.
Rust has gained popularity as the “second” Linux kernel high-level language. There’s been discussions about its applicability in various kernel subsystems which yielded tentative conclusions. Engineers have been advised by kernel gurus to use Rust for subsystem implementations rather than for drivers.
Vitaly will explain how he rewrote a zswap backend called zblock in Rust, then compare the performance and complexity of the two implementations.
Tim Orling
Tim, who serves on the board of directors of OpenEmbedded, will speak at the Yocto Project half-day mini-summit “Journey to Scarthgap 5.0” on Monday, April 15. With other YP community leaders, he will deep dive into upcoming features and improvements in the upcoming LTS release.
The rest of the week, you may find Tim in and around the Yocto Project booth in the exhibition hall. Please stop by with all your Yocto questions.
https://www.konsulko.com/wp-content/uploads/2024/04/EOSS-Seattle-2024-1.png900900Konsulko Grouphttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngKonsulko Group2024-04-14 13:52:332024-04-14 13:52:34Konsulko Group speaks at EOSS North America 2024 in Seattle
Integrity Measurement Architecture (IMA-measurement) is a subsystem in the Linux kernel designed to provide a framework for maintaining the integrity of files on a system. The primary purpose of IMA is to ensure that only trusted code and data are executed on a system and that the integrity of critical system components is maintained.
IMA was merged into the mainline Linux kernel in 2004 with the release of version 2.6.30. It evolved over time, adding features such as TPM integration, extended support, and continued maintenance, becoming a key component for ensuring the integrity of files in Linux-based systems. IMA works by calculating cryptographic hashes of files at various points in their lifecycle, such as when they are accessed, executed, or modified.
This article shares the exacts steps to build a minimal Linux distribution with IMA support for QEMU x86-64 using the Yocto Project and OpenEmbedded. The Yocto Project is an open-source collaboration project that enables developers to create lightweight, optimized, and customizable Linux distributions for embedded devices while maintaining control over the software components and configurations included in the system. To enable IMA, we use Yocto/OpenEmbedded layers meta-security and meta-integrity. These layers offer a comprehensive suite of security tools and hardening utilities designed for Linux kernels, along with libraries that facilitate the implementation of robust security mechanisms.
The following steps outline the process of building an image with Integrity Measurement Architecture (IMA) using the Yocto Project and OpenEmbedded. This demonstration uses the default debug keys provided in the “data” directory of layer meta-integrity. Because everyone has access to these private keys, for devices in production you must create your own private keys and use them instead. Enabling the audit kernel subsystem provides additional informational integrity auditing messages useful for debugging any appraisal issues that may arise during the development process.
Kindly be aware that this article utilizes source code derived from the primary branches of associated Yocto/OE layers. Consequently, we are selecting specific git commits that have been confirmed to function reliably. These commits will be part of the next long-term support (LTS) release of the Yocto Project which is version 5.0 with codename Scarthgap. It is scheduled for release in April 2024 and will be supported for 4 years until April 2028.
Download the source code:
git clone git://git.yoctoproject.org/poky poky-qemu
cd poky-qemu
git checkout e31be0b0e6ed6855787ebfbacc15bdbf1b9e511c
git clone git://git.yoctoproject.org/meta-security
cd meta-security
git checkout 30e755c59204cbd64c3aa12e64ab33041f6f02c0q
git clone git://git.openembedded.org/meta-openembedded
cd meta-openembedded
git checkout 57db42741df341718b9bb4b1b8f20d2e2fcf7010
After building the image, we can launch it. QEMU, short for Quick Emulator, is an open-source virtualization software that allows users to emulate various hardware platforms and run operating systems on different host systems. We will use it to run and test the image. By utilizing the “nographic” option, QEMU disables the video console, setting the console to “ttys0”. This feature is particularly beneficial when remotely accessing a build server over SSH. To verify the effectiveness of the appraisal process, attempt modifying a file, then confirm that the verification of the altered file subsequently fails.
Launch the image in QEMU:
runqemu nographic
Login and root and verify the integrity of file /etc/hostname using evmctl:
This simple example serves as a demonstration of how Linux IMA operates, using QEMU as a platform. However, to implement Linux IMA on real-world devices, Konsulko Group offers assistance with hardware bring-up and integration of the suitable Yocto/OE BSP (Board Support Package) layers.
Since the inception of OpenEmbedded and the Yocto Project, Konsulko engineers have actively contributed to the community and provided guidance for developing commercial products. We specialize in U-Boot, Linux kernel, RAUC, Mender, and various other open source projects for embedded Linux devices. Contact us to explore how Konsulko engineers can assist with your embedded product development endeavors.
https://www.konsulko.com/wp-content/uploads/2024/02/IMA-Linux.png600600Leon Anavihttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngLeon Anavi2024-02-29 08:07:502024-02-29 08:07:52IMA-measurement with Yocto Project and OpenEmbedded
Konsulko Group has made many upstream contributions to OTA (over-the-air) update solutions for embedded Linux devices. RAUC is a popular open source option as it has been meticulously developed with a keen emphasis on stability, security, and adaptability. Notably, RAUC seamlessly integrates with major build systems such as Yocto Project/OpenEmbedded, Buildroot, and PTXdist.
Functioning across diverse usage scenarios, one of RAUC’s elementary yet impactful functionalities is the A/B update mechanism. In this setup, two identical root filesystems, denoted as A and B, are maintained. The device boots from one of these, while the other serves as the target for updates.
Post-update completion, the bootloader directs the system to boot from the freshly updated partition during the subsequent system startup. RAUC incorporates the ‘verity’ update bundle format. It extends the capabilities of RAUC by introducing built-in support for HTTP(S) network streaming, adaptive delta-like updates, and comprehensive update bundle encryption.
This article provides, as an example, the exact steps how to integrate RAUC with Yocto Project and OpenEmbedded for booting from a microSD card on BeagleBone Black.
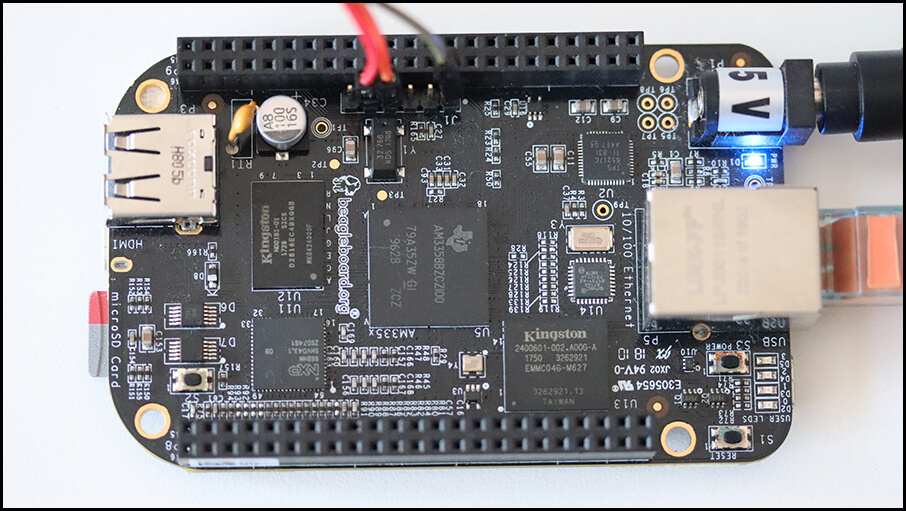
Released in 2013, BeagleBone Black is a single-board computer (SBC) developed by the BeagleBoard.org Foundation. It was certified by the Open Source Hardware Association with OSHWA UID US000236. The chipset on BeagleBone Black is Texas Instruments Sitara AM3358 with 1GHz ARM Cortex-A8 CPU and SGX 3D graphics engine. Because of this the demonstrated integration is a suitable reference for other embedded devices equipped Texas Instruments chipsets.
Required Hardware
The hardware used for this step by step tutorial is:
RAUC, a robust and powerful open-source solution, demands advanced skills for initial integration. In general, to incorporate RAUC in a Yocto Project and OpenEmbedded image for BeagleBone Black the following actions have to be performed:
Use U-Boot as a bootloader
Enable SquashFS in the Linux kernel configuration
Use ext4 root file system
Design specific storage partitioning for the certain use case and configure RAUC accordingly
Provide a custom U-Boot script to properly switch between RAUC slots
Prepare a certificate and keyring to use for signing and verifying RAUC update bundles.
Leon Anavi has already done all these actions for core-image-minimal in Yocto/OpenEmbedded layer meta-rauc-community/meta-rauc-beaglebone. The layer is available at GitHub. Please follow the steps below to build core-image-minimal for BeagleBone Black with it:
Download the long term support (LTS) release Kirkstone reference Yocto distribution, Poky:
git clone -b kirkstone https://git.yoctoproject.org/poky poky-rauc-bbb
cd poky-rauc-bbb
Adjust conf/local.conf by appending the following configurations to the end of the file:
MACHINE = "beaglebone-yocto"
# Use systemd as init manager
INIT_MANAGER = "systemd"
# Add RAUC to the image
IMAGE_INSTALL:append = " rauc"
DISTRO_FEATURES:append = " rauc"
Build a minimal bootable image:
bitbake core-image-minimal
The image creation process from scratch is time-consuming, encompassing various Yocto/OpenEmbedded recipes and configurations. Kindly await completion as bitbake diligently executes each tasks.
Flash tmp/deploy/images/beaglebone-yocto/core-image-minimal-beaglebone-yocto.wic.xz to microSD card.
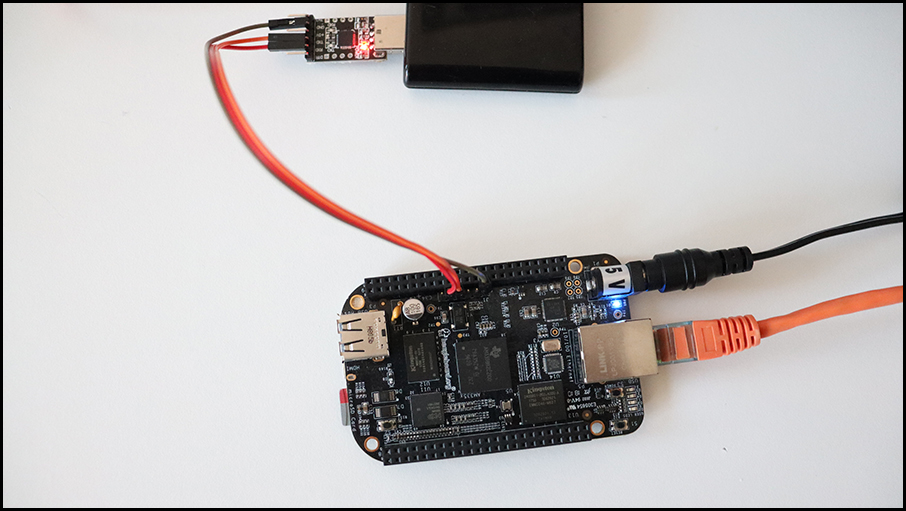
Attach the USB-to-UART adapter to BeagleBone Black, plug the ethernet cable and the microSD card.
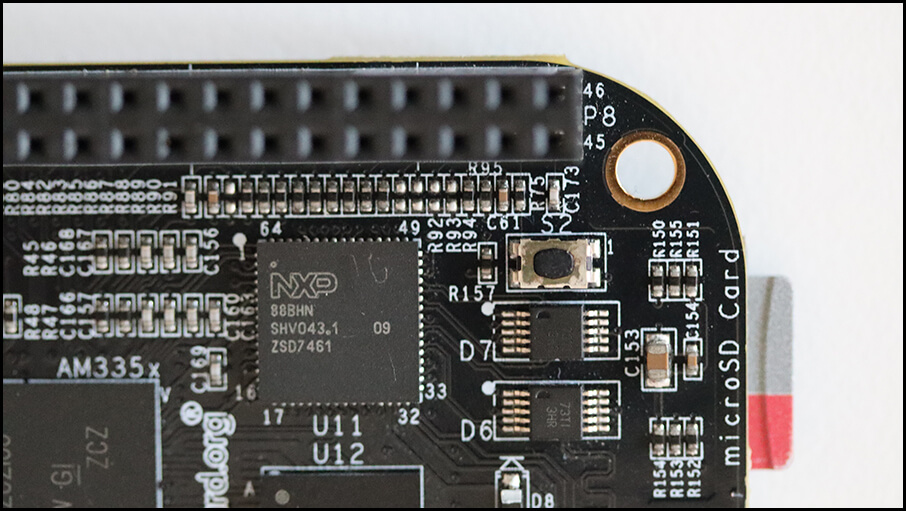
Press and hold button S2 while plugging in the 5V DC power supply to turn on BeagleBone Black and boot from microSD card.
BeagleBone black board has an onboard button labeled as S2. It is situated near the microSD card slot. Press and hold it while powering the board to boot from microSD card.
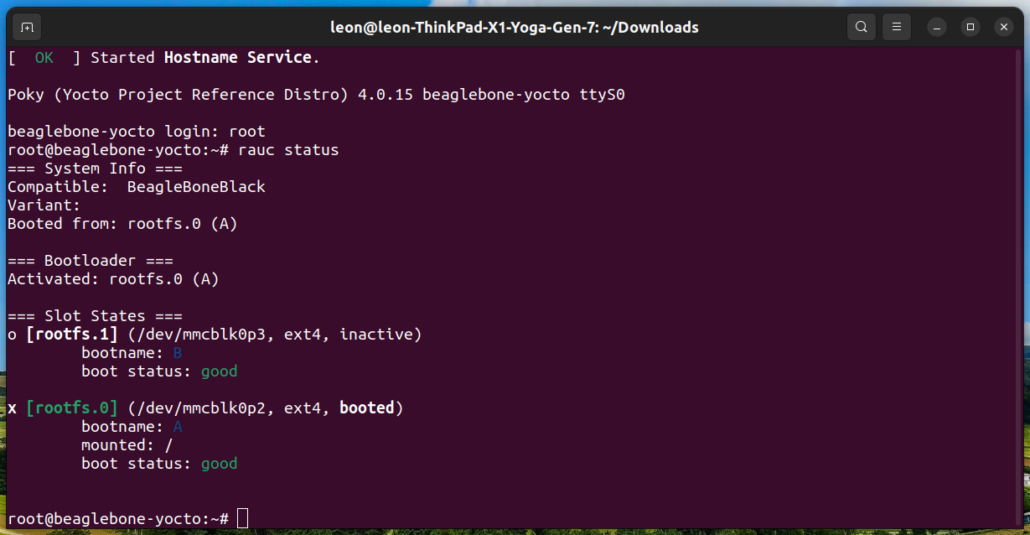
Verify that the system boots successfully, log in as user root without a password and check RAUC status:
rauc status
On the screenshot BeagleBone Black has been booted from RAUC slot rootfs.0 (A) on the microSD card.
NOTE: The meta-rauc-beaglebone layer includes a core-image-minimal.bbappend file, housing essential configurations for RAUC functionality. Apply these configurations similarly to other images intended for use in your embedded Linux device.
Creating a RAUC Update Bundle
A RAUC update bundle comprises the file system image(s) or archive(s) designated for system installation, accompanied by a manifest detailing the images for installation, encompassing options and meta-information. Additionally, it may include scripts designated for execution before, during or after the installation process. To sign and verify the update bundles RAUC uses SSL keys. Layer meta-rauc-beaglebone contains a keyring containing all keys and a recipe for a simple RAUC update bundle for demonstration purposes only.
Follow the steps below to create RAUC update bundle that extends the system by adding the popular text based editor nano:
Add to conf/local.conf:
IMAGE_INSTALL:append = " nano"
Build the RAUC update bundle:
bitbake update-bundle
Following a successful execution, bitbake will produce the update-bundle-beaglebone-yocto.raucb file.
Updating BeagleBone Black with RAUC
Follow the steps below to update core-image-minimal running from a microSD card on BeagleBone Black:
Start a Python 3 web server on the build machine or another computer where the RAUC update bundle (aka update-bundle-beaglebone-yocto.raucb) is available and within the same network as BeagleBone Black, for example:
cd tmp/deploy/images/beaglebone-yocto/
pip3 install --user rangehttpserver
python3 -m RangeHTTPServer
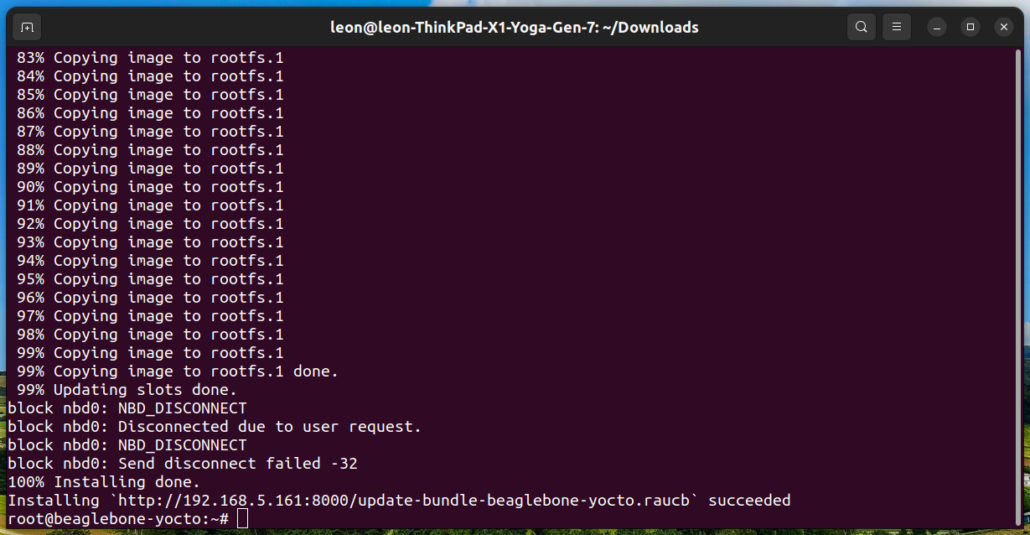
On BeagleBone Black replace <IP> with the actual IP address of the computer on which the HTTP server is running and execute the following command to install the update:
The screenshot show successful installation of the RAUC updated bundle on BeagleBone Black.
Reboot BeagleBone Black to load the updated version:
reboot
NOTE: As alternative, instead of using an HTTP server, you can transfer the update bundle to BeagleBone Black and install it from local storage.
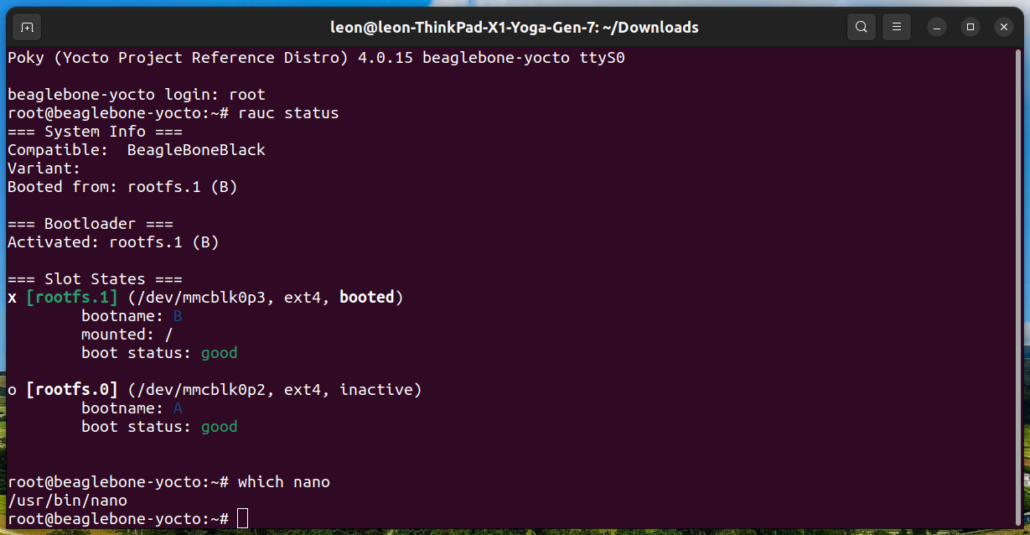
Verify that nano was added to the system:
which nano
Check RAUC status to confirm the system have booted from the second partition:
rauc status
On the screenshot, after sucessful installation of the RAUC update bundle, BeagleBone Black has been booted from RAUC slot rootfs.1 (B) on the microSD card. This slot contains nano.
In real-world product development, the Yocto Project and OpenEmbedded workflow can be enhanced with a few commands for easy implementation of continuous integration (CI).
From the dawn of OpenEmbedded and the Yocto Project, Konsulko engineers have been community contributors and guides for crafting commercial products. Our expertise spans RAUC, Mender, and various open-source solutions for top-notch software updates. Please get in touch with us to discuss how Konsulko engineers can help your own embedded product development.
https://www.konsulko.com/wp-content/uploads/2024/01/RAUC-BeagleBone-Black-2.png600600Leon Anavihttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngLeon Anavi2024-01-30 15:14:162024-04-01 10:26:02Integrating RAUC with Yocto Project on BeagleBone Black
Konsulko Group has had another great year. We’ve helped our customers build new breakthrough embedded products of all sizes, from semiconductors to medical devices to automotive to heavy equipment.
We continue strong relationships with the Linux Foundation, Yocto Project and Automotive Grade Linux. We work with our partners mender.io and PHYTEC, providing support and development for their customers.
Konsulko is growing
We’ve expanded our footprint across the US and Europe, welcoming three outstanding engineers to the team: George McCollister, Darko Alavanja and Bryan Cisneros.
George McCollister has over 25 years of experience in Embedded Systems development. Starting with 8051 microcontrollers and quickly adopting Linux, he has worked on a wide range of technologies from network switches and storage appliances to automated utility fault restoration and process automation. He was a key designer and architect of an industry leading utility automation platform.
Darko Alavanja was deeply involved with robotics as a student, competing in several teams in the Eurobot contest. He designed mechanical components, PCBs, sensor electronics, actuator systems and software used for creating mobile robots. Darko has developed embedded systems for industrial devices such as FPGA-based hardware-in-the-loop equipment, controllers for industrial machinery and protocols for communication gateways.
Bryan Cisneros has developed embedded software, UIs, and test code across various industries, including medical devices, RF modules, and AI-enabled cameras. Before joining Konsulko, Bryan worked in the defense industry developing networked applications for weapons and information systems, focusing on redesigning outdated UIs and programs, and implementing CI/CD pipelines.
Committed to the Open Source community
In addition to our consulting work for our customers, Konsulko Group continues to actively participate in the Open Source community and its conferences around the world.
Konsulko’s senior leadership have been contributors in the Linux kernel and other OSS communities since the late 1990s. The entire Konsulko team has been involved in a number of Open Source projects including U-Boot, Yocto Project, OpenEmbedded and Automotive Grade Linux (AGL).
https://www.konsulko.com/wp-content/uploads/2023/12/2023-THE-YEAR-IN-REVIEW.png12001200Konsulko Grouphttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngKonsulko Group2023-12-27 08:03:152023-12-27 13:58:53Konsulko Group: The Year in Review 2023
Formerly known as the Yocto Project Developer Day, the Summit has an expanded scope to include both workshops for engineers building customized Linux distributions and applications, as well as an open forum where maintainers, trainers and users present papers on how the project is evolving and how they are using it.
Leon will examine the technical aspects — dependance on Neat VNC and AML libraries, TLS support and user authentication — followed by a step by step tutorial to demonstrate remote connection from another computer.
The presentation aims to simplify the process of setting up the VNC backend in Weston and empower developers to utilize this powerful feature seamlessly within their projects.
We hope you will join us for this presentation, and all of this new edition of Yocto Project Virtual Summit.
https://www.konsulko.com/wp-content/uploads/2023/10/YoctoVirtualSummit11-2023.png600600Konsulko Grouphttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngKonsulko Group2023-11-01 10:12:202023-11-22 09:25:58Konsulko Group engineer to speak at Yocto Project Summit
Yocto Project has received major funding from the Sovereign Tech Fund to aid and drive significant transformation. The funded work improves the long-term sustainability of the project by attracting a new generation of developers.
Konsulko Group is proud of the work done by principal engineer Denys Dmytriyenko and the Yocto Project Technical Steering Committee to help secure the funding. Together, they spent many hours over several months to identify development areas that can be self-contained and measured, then estimated required efforts for the proposal so the funding might be approved.
The work the Sovereign Tech Fund (STF) is commissioning aims to improve the Yocto Project’s efficiency, security, user experience, and developer engagement in these specific areas:
Build Process and Workflow
Core workflow improvements, including enhancements to build tooling and workflows.
Development of the Yocto Project Reference Binary Distribution, focusing on workflow improvements and policies.
Introduction of Patchtest, an automated testing tool for code patches submitted via mailing lists.
Security and Quality Improvements
Strengthening security processes and the security team.
Advancing Software Bill of Materials (SBOMs) for improved transparency.
Addressing tooling issues and enhancing quality-of-life features in Devtool, Recipetool, and Pseudo.
Integration and Usability Enhancements
Updates and improvements to Toaster, a web-based UI for BitBake.
Integration of VSCode with Yocto Project for enhanced developer features and usability.
Layer Management Standardization
Integration of OpenEmbedded Core best practices into Meta-OpenEmbedded.
Development of standard tools for managing Yocto layers, promoting layer tooling standardization.
STF is funded by the German Federal Ministry of Economics and Climate Action (BMWK) and supported by the German Federal Agency for Disruptive Innovation GmbH (SPRIND).
https://www.konsulko.com/wp-content/uploads/2023/10/sovereigntechfund-1.png952952Konsulko Grouphttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngKonsulko Group2023-10-16 09:38:542023-10-17 09:13:14Helping Yocto Project secure important new funding from STF
Konsulko engineers will be giving two talks at Embedded Open Source Summit (EOSS), a new Linux Foundation umbrella event held in Prague, Czech Republic, June 27-30, 2023. Attending virtually is also an option. Incorporated into EOSS are the Embedded Linux Conference (ELC) and the Automotive Linux Summit Europe (ALS).
The Vehicle Signal Specification (VSS) has been included in the AGL UCB by incorporating the KUKSA.val project. Scott will provide an update on the work done for the upcoming Prickly Pike UCB release.
The meta-tegra BSP layer supports the NVIDIA Jetson family of systems-on-module and has an active OpenEmbedded for Tegra community. Tim and Ilies will discuss changes in the latest SDKs including the bootloader and the trusted OS, and how these affect secure boot and disk encryption implementations. They will also discuss changes needed to support over the air updates and cover how the community keeps up with upstream Open Embedded/Yocto Project changes, as well as the roadmap for support for future Jetson platforms and Yocto Project releases.
Please join Scott, Tim, and a good-sized contingent of our engineers in Prague (or virtually). Register here.
https://www.konsulko.com/wp-content/uploads/2023/06/EOSS-1.png11971196Konsulko Grouphttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngKonsulko Group2023-06-12 14:26:522023-09-27 08:47:05Konsulko Group to speak at EOSS / ELC / ALS in Prague
(This article was written by open source software enthusiast and Konsulko Group intern Atanas Bunchev, working with Konsulko Senior Engineer Leon Anavi.)
RAUC is one of the popular solutions that provide OTA (over-the-air) updates for Embedded Linux devices. RAUC is developed with focus on stability, security and flexibility and is compatible with all popular build systems: The Yocto Project/OpenEmbedded, Buildroot and PTXdist.
RAUC is capable of covering various use cases the most simple one being A/B updates.
The A/B updates scenario consists of having 2 identical root filesystems (named A and B), booting from one of them and performing the update on the other. After the update is complete the bootloader will boot from the updated partition on the next system boot. Recently the ‘verity’ update bundle format was introduced in RAUC. This new groundbreaking feature improves the verification process and most importantly allows extending RAUC by built-in HTTP(S) network streaming support, adaptive delta-like updates, and full update bundle encryption.
This article provides an example for setting up RAUC for A/B updates scenario on a HummingBoard board. The hardware used for the example is:
HummingBoard Pro board
32GB microSD card
UART to USB adapter
RAUC is a robust, powerful and flexible open source solution that requires advanced skills for initial integration. To use RAUC in an image built with the Yocto Project and OpenEmbedded for CuBox-I/HummingBoard one needs to:
Use U-Boot as a bootloader
Enable SquashFS in the Linux kernel configuration
Use ext4 root file system
Design specific storage partitioning for the certain use case and configure RAUC accordingly
Provide a custom U-Boot script to properly switch between RAUC slots
Prepare a certificate and keyring to use for signing and verifying RAUC update bundles.
Building a Linux Distribution with RAUC
I’ve recently contributed to meta-rauc-community, a repository containing minimal RAUC example layers for Yocto/OpenEmbedded.
The following steps will show how to use the meta-rauc-nxp layer from that repository to build and update a minimal Linux distribution. The update will install nano (the text editor) to the system.
Download the reference Yocto distribution, Poky. We’ll use the latest long term support version, kirkstone.
$ git clone -b kirkstone https://git.yoctoproject.org/poky
$ cd poky
Adjust conf/local.conf by adding the following configurations to the end of the file:
# HummingBoard specifications are very similar to Cubox-I
MACHINE = "cubox-i"
# Accept end user agreement required by the BSP layer.
ACCEPT_FSL_EULA = "1"
# Use systemd as init manager
INIT_MANAGER = "systemd"
# Add RAUC to the image
IMAGE_INSTALL:append = " rauc"
DISTRO_FEATURES:append = " rauc"
# Generate ext4 image of the filesystem
IMAGE_FSTYPES:append = " ext4"
# Use the file containing the partition table specification
WKS_FILE = "sdimage-dual-cubox-i.wks.in"
WKS_FILES:prepend = "sdimage-dual-cubox-i.wks.in "
# Add 150 000 KBytes free space to the root filesystem
# (Adding software with updates require space.)
IMAGE_ROOTFS_EXTRA_SPACE:append = " + 150000"
# Add the boot script to the boot partition
IMAGE_BOOT_FILES:append = " boot.scr"
Note that whitespace inside quotes is intentional and important.
To sign and verify the update bundles RAUC uses SSL keys. A keyring containing all keys that will be used for update bundles needs to be installed on the target.
meta-rauc-community provides a script that would generate example keys and configure the current build environment accordingly. (The script has to be called after sourcing oe-init-build-env)
$ ../meta-rauc-community/create-example-keys.sh
Build a minimal bootable image:
$ bitbake core-image-minimal
Building an image from scratch is a long process involving a lot of tasks. Please patiently wait until bitbake completes all tasks.
It’s strongly recommended to zero-fill the u-boot environment sectors before flashing the image on the microSD card (replace /dev/sdX with the proper device path):
$ dd if=/dev/zero of=/dev/sdX seek=2032 count=16
After the build is done, flash the image to a microSD card (replace /dev/sdX with the proper device path) and boot it on the HummingBoard:
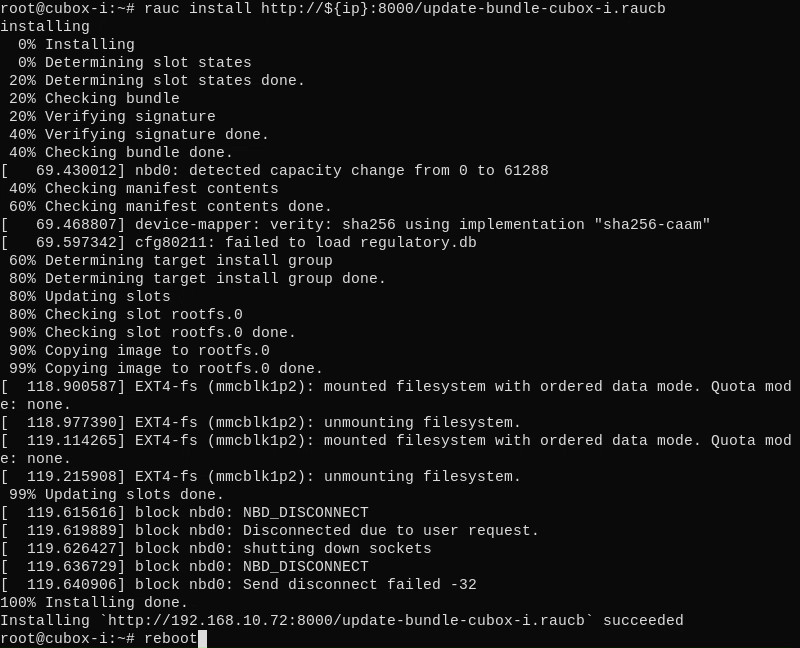
One of the latest RAUC features is the verity bundle format. This format allows updates to be done without storing the whole bundle on the device in advance, which is useful for devices with limited space. One of the requirements for this feature is hosting the bundle on a server that supports HTTP Range Requests.
As alternative, you can transfer the bundle to the device and install it from local storage.
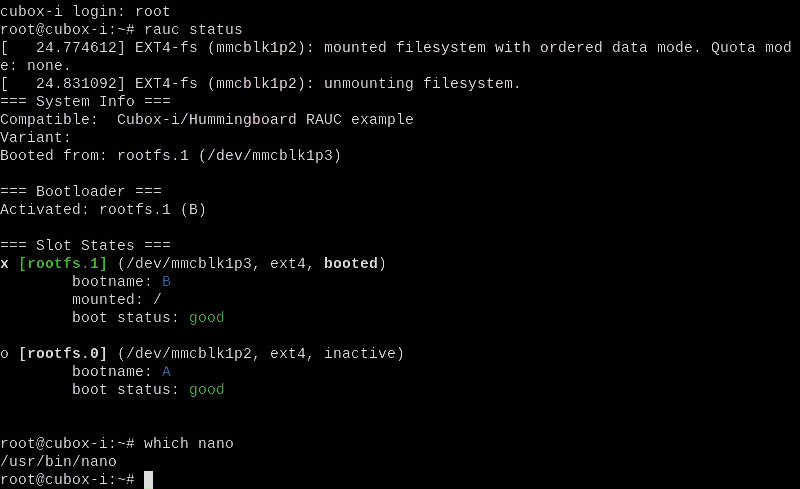
Verify that nano was added to the system:
# which nano
Check RAUC status to confirm the system have booted from the second partition:
# rauc status
For real-world products, this build procedure with the Yocto Project and OpenEmbedded can be optimized further with just a few commands for easy implementation of continuous integration (CI).
Since the earliest days of the OpenEmbedded build framework and Yocto Project, Konsulko engineers have been contributing to the community and helping customers build commercial products with these technologies. We have experience with RAUC, Mender and other open source solutions for software updates. Please contact us to discuss your own embedded product development.
https://www.konsulko.com/wp-content/uploads/2023/02/RAUC-Hummingboard-1.png16001600Konsulko Grouphttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngKonsulko Group2023-02-16 15:51:012023-05-01 10:52:03Setting up RAUC on CuBox-I/HummingBoard for Software Updates
2022 went by quickly with Konsulko engineers working closely with our customers, our partners and the open source community. For the tenth straight year, Konsulko Group has helped our clients build outstanding commercial products with Embedded Linux, Yocto Project and OpenEmbedded, as well as deploying Over-the-Air (OTA) software updating.
We had particular success with our Konsulko Continuous Time Engagement™ offering, providing dedicated engineering resources for two of the world’s largest semiconductor companies. This model provides guaranteed engineering time for an agreed period. KCTE has allowed our customers to use our engineers on a variety of their requirements, and switch between these tasks as the rest of their project and in-house engineering required.
Of course, many of our clients prefer Konsulko OnDemand Time Engagement™, SOW-based engineering for high level consulting, on-demand support, and specific tasks within a larger project. KOTE is also best for longer term engagements without a hard deadline that can be stopped and started as necessary, and projects with an expected pause (such as bring-up of new hardware which almost always results in a re-spin of the PCB).
Partnerships and Conferences
We continue our strong relationship with the Linux Foundation and Automotive Grade Linux. We worked with mender.io and PHYTEC, providing support and development for their customers. With our friends at ICS, we presented at a joint webinar in August, Software Update Mechanisms: Selecting the Best Solution by Konsulko’s Leon Anavi and ICS’ Jeff Tranter.
Our Konsulko engineers were active participants (often in person, sometimes virtually) in conferences and developer gatherings. Leon Anavi, Vitaly and Maria Wool, and Tim Orling made presentations at the Embedded Linux Conferences (North America and Europe), FOSDEM and Yocto Project Summits:
The bar is pretty high for joining Konsulko Group. Some of our team have thirty years experience with embedded software and Linux. Most have over twenty and all have over fifteen years, working (and playing) with Linux and the open source community. So we were happy to welcome Denys Dmytriyenko and António Oliveira to Konsulko Group this year.
Denys is a long time Open Source Software developer, contributing code to many FOSS projects, like glibc, PostgreSQL, KDE, MythTV, LIRC, OpenEmbedded, and Yocto Project. Before joining Konsulko Group, he worked as Software Developer and Architect for Texas Instruments for almost 20 years on numerous Embedded Linux (MIPS and ARM-based) products. Since 2011 Denys has served on the OpenEmbedded Board of Directors, and since 2019, on the Yocto Project Technical Steering Committee. He is a long time contributor and maintainer of numerous recipes and layers in the OpenEmbedded/Yocto Project universe.
António has worked in development of highly optimized hardware and software ranging from deeply embedded microcontrollers to full-fledged graphical user interfaces. During this time, he has gained extensive experience in build automation tools, analog and digital circuits, powerline communications, and low power and low frequency radio communications. An active member of the open source community, he has contributed to Yocto Project and the Linux kernel. In addition to his work as an embedded engineer, António served eight years on the executive board of his local parish in Portugal, including four years on the municipal council.
We hope you will have the opportunity to work with Denys, António and the rest of Konsulko Group in 2023.
https://www.konsulko.com/wp-content/uploads/2022/11/2022-THE-YEAR-IN-REVIEW.png12001200Konsulko Grouphttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngKonsulko Group2022-12-13 12:26:162023-02-26 11:02:50Konsulko Group: The Year in Review 2022
Konsulko Group’s Leon Anavi will present Porting Mender to New i.MX 8M Plus Machine and Working with Toradex BSP at the Yocto Project Virtual Summit. Leon will focus on porting Mender, a popular open source over-the-air software update solution, to Toradex Verdin iMX8M Plus SoM. He’ll examine the exact steps to build images for it and the Dahlia carrier board using the long-term support release of Yocto Project and the Toradex BSP.
The Yocto Project Virtual Summit is a 3-day technical conference for engineers, open source technologists, students and academia in the OSS space. Learn about Yocto Projects’ direction, get training on the next wave of embedded Linux technologies and network with industry peers, Yocto Project maintainers, OpenEmbedded maintainers and other experts.
Registration is $40 for the whole event. We hope you are able to join us.
https://www.konsulko.com/wp-content/uploads/2022/11/yocto-project-SUMMIT-11292022-1.png17981798Konsulko Grouphttps://www.konsulko.com/wp-content/uploads/2021/03/KonsulkoGroup-fullcolorlogo-340x156-1.pngKonsulko Group2022-11-03 15:49:102022-12-26 08:08:56Konsulko Group to speak at Yocto Project Virtual Summit