As we reach the end of 2024, we want to thank our customers, partners and engineers for another successful year (our 12th!) helping companies around the world develop their embedded products.
We’ve collected sixteen new case studies across multiple industries to showcase our work and give a sense of the scope and breadth of our engineering across multiple industries.
Healthcare Industry Solutions
At Konsulko Group, we provide engineering services to help our customers develop innovative, secure, and FDA-compliant healthcare products. With expertise spanning biometric sensor integration, secure embedded Linux development, and scalable system design, we provide software and hardware engineering services to support our customers in the medical industry as they develop innovative and reliable products.
Our work spans a wide range of applications, and we are engaged by Point-of-Care Diagnostics companies, Medical Device Startups, Robotics and Automation developers, Biometric Sensor Integration projects and established Healthcare manufacturers.
Read two case studies:
- Secure Point-of-Care Diagnostics
- Communication Hub Proof-of-Concept
Industrial Automation, Heavy Equipment Manufacturers and Smart Energy
Konsulko Group provides engineering services to support customers in designing and developing innovative products across the industrial and heavy equipment market. Our clients rely on our expertise to bring their ideas to life, whether they are building advanced agricultural machinery, mining systems or industrial automation equipment. While we do not deliver turnkey solutions, we offer the hardware and software engineering capabilities necessary to help our customers achieve their goals.
We work with a diverse range of customers, including global leaders in Agriculture Technology, Mining Equipment, Transportation and Railway Technology providers, Heavy Machinery manufacturers, and Food and Manufacturing Equipment suppliers.
We’ve published five case studies:
- Secure Device Management in Industrial Automation
- Scalable IoT Device Management on Kubernetes for Construction/Home Automation
- Addressing Emissions Issues in i.MX8M-based hardware for MIL-STD461G Compliance
- Custom Yocto Build for Nvidia Jetson Xavier AGX for Defense/Industrial manufacturers
- Real-Time PRU and Xenomai Integration for ADC Data Acquisition on BeagleBone Black for the Smart Energy industry
Services for the Telecommunications Industry
Konsulko Group has extensive experience providing engineering services to support our telecommunications customers in designing and developing innovative technologies. With expertise in embedded Linux software and hardware engineering, we help our customers create next-generation products.
We collaborate with a diverse range of customers in the telecommunications industry, including Network Infrastructure suppliers, Wireless Communications innovators, Satcom Technology developers, Telecom Monitoring and Optimization specialists, and Defense and Secure Communications providers.
You may read detailed descriptions of five of our engagements here:
- Prototype Development of New Networking Architecture
- Embedded Linux Engineering for Networking Routers
- Yocto Project Customization for Advanced Telecommunications Hardware
- Secure Embedded System with Webserver and Device Driver Development
- Driver Development for High-Performance FPGA Ethernet Systems
Engineering the Next Generation of Transportation
The transportation industry is undergoing a technological revolution, and Konsulko Group is at the forefront, helping customers develop embedded systems that drive innovation in connected vehicles, autonomous platforms, and advanced automotive technologies.
We work with a diverse range of customers in the transportation industry, including Connected and Autonomous Vehicle developers, Semiconductor leaders, Mapping and Navigation innovators, Industry Consortiums and OEMs, and Silicon Valley Innovation Offices.
We’ve posted four case studies of a few of our engagements:
- Audio System Integration for Autonomous Vehicle Platform
- Apple CarPlay Integration for Automotive Infotainment
- Multimedia Audio System Development and Integration
- Debugging and Resolving Infotainment System Freeze Issues
Expanding Konsulko’s reach and expertise
Embedded hardware engineering
Konsulko Group offers complete hardware services including design, integration, validation and certification, rapid prototyping, biometric signals, sensors, wireless communications, low power applications and manufacturing test/support.
In April, Konsulko Group welcomed three veteran hardware developers to our growing team. Alexandar Kalaydjiev now serves as Konsulko Hardware Director. Marin Balkandjiev and Tsvetan Mudrov, PhD joined Konsulko as Principal Hardware Engineers.
Customers can leverage their technical expertise and extensive experience to create comprehensive products and solutions tailored to their specific requirements.
Konsulko hardware engineers can manage and facilitate the production of the developed products, ensuring their successful realization. We can provide deployment support as required, ensuring a smooth transition for the end-customer.
New in 2024 to our expert team of engineers
In addition to our Hardware group, Konsulko continues to attract outstanding talent to our team. This year we have added three individuals who represent some of the best in embedded Linux and open source engineering.
- Peter Tyser has designed hardware and software for rugged, high performance computers targeting military, aerospace, and industrial applications. He has hands-on experience with hardware design, board bring-up, board debug, firmware development, OS development, documentation, failure analysis, product verification, and anti-tamper security.
- Andrew Bradford (bradfa) is an author/developer of the “Cross Linux From Scratch” embedded book and has contributed patches to the Linux kernel, u-boot, and Yocto/OpenEmbedded projects. He also has extensive experience with EnergyStar and EMC/EMI testing, compliance, and certification.
- Filipe Pires has crafted robust, efficient, and user-friendly applications that run seamlessly on Linux platforms. Filipe is experienced in build automation, scripting, and web development, with proficiency in multiple frameworks and industry best practices.
You can learn more about the whole Konsulko team of embedded hardware and software consultants on our Meet the Team page.
Open source contributions and conferences
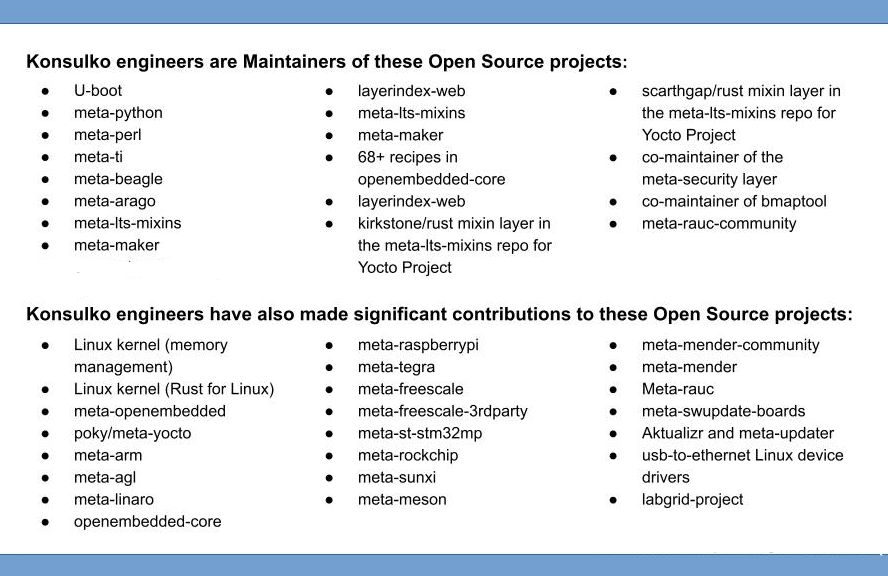
Konsulko’s senior leadership have been contributors in the Linux kernel and other OSS communities since the late 1990s. In addition to our commercial engineering work for our customers, the Konsulko team continues to have active roles in a number of Open Source projects including U-Boot, Yocto Project, OpenEmbedded and Automotive Grade Linux (AGL).
Konsulko engineers made presentations at open source and commercial conferences and developer gatherings including Embedded Linux Conferences (North America and Europe), AGL All Member Meetings and Yocto Project Summits. We also published seven new technical articles as blogs on our website.
All of us at Konsulko Group look forward to working with you in the coming year. Contact us to explore how our engineering services can help bring your innovative products to life in 2025 and beyond.